Makalah Cara Pembuatan Robot Line follower Berbasis Arduino Uno
LAPORAN TUGAS SISTEM KONTINYU
Rancang Bangun Robot Line Follower

KELOMPOK :
ASEP ILHAM MAULANA (
041624005 )
GIVARI ALAMHUDI ( 041624006 )
IBNU MALIK HASANY ( 041624007 )
DEVI ALIYA MAJID ( 041624001 )
FERY SURYANTORO ( 041624004 )
MHD IFNU JUHARI (
041523017 )
Program
Studi
D3 TEKNIK ELEKTRO
POLITEKNIK
SWADHARMA JAKARTA
2017
KATA PENGANTAR
Segala
puji dan syukur kepada Tuhan YME, karena kami dapat menyelesaikan penyusunan laporan praktikum Pembuatan Robot Line Follower Menggunakan Motor Driver L298N dan
Sensor Infrared. Laporan ini ditulis untuk memenuhi tugas praktikum“ SISTEM
KONTINYU” serta sebagai kelengkapan standar kelulusanmata kuliah SISTEM KONTINYU.
Dalam
laporan ini kami memperlajari cara bagaimana membuat Robot Line
Follower Menggunakan,Motor Driver, serta
penambahan fungsi, sensor infrared, tujuanya yaitu
untuk mengetahui struktur rangkaian fungsi pin dari Motor Driver dan mengukur
jarak antara objek dengan robot agar tidak bertabrakan dan mengikuti garis, dan juga mengimplementasikan program di Arduino Uno yang
digunakan untuk Robot Line Follower.
Kami
mengharapkan bahwa laporan ini dapat bermanfaat khususnya untuk Mahasiswa Elektro Politeknik Swadharma dan umumnya komunitas robotika. Agar ilmu
yang didapatkan dari pembelajaran dapat
lebih banyak lagi dan menambah wawasan di bidang robotik.
Akhir
kata, kami sampaikan terima kasih kepada pak Adri Senen ST.MT, selaku Dosen Pengajar,
serta kepada pihak terkait yang telah membantu penyusunan laporan praktikum
Pembuatan Robot Line Follower.
Kritik dan saran kami harapkan dari semua pihak, agar proses penyusunan laporan menjadi lebih baik
lagi dimasa yang akan datang.
Tangsel, 25 Desember 2017
Penyusun
BAB 1
PENDAHULUAN
A.
Latar Belakang
Robot Line Follower merpuakan robot yang
bergerak membaca garis secara otomatis dengan memanfaatkan sensor infrared. Biasanya garis yang
dibaca oleh Robot Line Follower adalah
garis berwarna hitam dengan latar bewarna putih infrared berfungsi untuk membaca jalur/garis hitam
sehingga robot dapat bergerak mengikuti garis yang sesuai. Penambahan perangkat
yang ada di Robot
Line Follower adalah ARDUINO UNO (pengendali
utama), sehingga robot bisa disisipkan sebuah program agar dapat lebih optimal.
Pada tugas besar mata kuliah SISTEM KONTINYU kali ini akan
dirancang sebuah Robot Line Follower
menggunakan arduino uno
dengan perangkat yang menyesuaikan pada Robot Line Follower menggunakan Motor Driver.
kemudian bentuk sensor dibagian depan untuk memaksimalkan pembacaan garis.
B.
Rumusan masalah
Berdasarkan
latar belakang di atas, maka disusun rumusan masalah sebagai berikut :
1. Komponen apa saja yang diperlukan dalam
pembuatan Line Follower.
2. Bagaimana prinsip kerja pada Line Follower r.
3. Bagaimana cara membuat rangkaian Line
Follower.
C.
Tujuan dan Manfaat
Ø Mengetahui komponen-komponen elektonika yang menjadi
fungsi-fungsinya sehingga dapat mengaplikasikannya dalam bentuk sebuah
rangkaian.
Ø Mengetahui dan memahami sistem dan cara kerja Line
Follower.
Ø Mengetahui bagaimana cara membuat rangkaian robot Line
Follower.
Ø Mahasiswa mampu merancang dan mengimplementasikan suatu
robot pengikut garis dengan menggunakan arduino uno dan sensor infrared.
Ø Mahasiswa dapat memahami prinsip kerja robot pengikut
garis berbasis Arduino Uno.
A.
Batasan Masalah
Dalam penyusunan
makalah ini kami hanya membatasi materi mengenai :
1. Fungsi tiap
komponen dalam rangkaian Line Follower yang terdiri dari rangkaian sensor,
komparator, dan driver.
2. Prinsip kerja dari Line Follower.
B.
Ruang Lingkup
Ruang lingkup pembuatan laporan ini,
yaitu: pengenalan akan mekanisme dalam pembuatan robot pengikut garis, komponen-komponen yang
digunakan, fungsi dan cara kerja Sensor Infrared, pengenalan akan Arduino Uno,
prinsip dan cara kerja robot pengikut garis.
C.
Alat
dan Bahan
A.
Daftar Alat Yang Digunakan
|
Nama
Alat
|
Jumlah
|
|
Gergaji besi
|
1 buah
|
|
Cutter akrilik
|
1 buah
|
|
Tang Rivet
|
1
buah
|
|
Obeng
|
1 buah
|
|
Tang kecil
|
1 buah
|
|
Gunting
|
1 buah
|
|
Korek api
|
1 buah
|
|
Spidol
|
1buah
|
|
Bor kecil
|
1 buah
|
|
Solder
|
1 buah
|
|
Penggaris
|
1 buah
|
B.
Daftar
Komponen Bahan
Yang Digunakan
|
Nama
Bahan
|
Jumlah
|
|
Akrilik 1m
|
1 Buah
|
|
Plat Lumunium 1m
|
1
Buah
|
|
Baut
|
20
Buah
|
|
Mur
|
20
Buah
|
|
Pcb
|
1
Buah
|
|
Paku Rivet
|
15 Buah
|
|
Roda
|
2 Buah
|
|
Roler
|
1 Buah
|
|
Isolatip
|
2 Buah
|
|
Lem
|
1 Buah
|
|
Nama
Komponen
|
Jumlah
|
|
Arduino Uno
|
1 Buah
|
|
Motor Driver
L298N
|
1 Buah
|
|
Sensor Infrared
|
2
Buah
|
|
Motor DC 12 Volt
|
2 Buah
|
|
Protoboard kecil
|
1 Buah
|
|
Battery 3600 MAH
|
2 Buah
|
|
Kabel Jumper
|
35 Buah
|
|
Konektor Klip
Battery 9 volt
|
2 Buah
|
BAB II
PERANCANGAN
A.
LANGKAH
KERJA
Dalam pembuatan robot line follower terdiri dari beberapa tahap
yaitu tahap konsep perancangan dan rangkaian, pembuatan desain antarmuka, harus
mengetahui prinsip kerja robot line follower, serta pembuatan algoritma dan
program.
1.
Konsep Rancangan Dan Rangkaian
Rangkaian yang akan dibuat akan terlihat lebih sederhana
dikarenakan pembuatan robot line follower ini untuk memfasilitasi kinerja
motornya menggunakan motor driver.
Pertama kita hubungkan pin-pin motor driver pada arduino sesuai kebutuhan dan
skema, setelah itu lalu hubungkan pin motor driver ke motor DC. Dan hubungkan
pin sensor ke pin digital Arduino.
2. Setelah Kabel
Terhubung Semua, Langkah Berikutnya Adalah Persiapan Membuat Algoritma
Dan Programnya.
3.
Desain Antarmuka
Desain robot line follower sendiri panjang dan lebarnya
berukuran 20 x 20 cm sedangkan tingginya sekitar 9 cm. Desain di, tingkat pertama sebagai
tempat untuk arduino, battery dan driver
motor. sedangkan dibagian
depan untuk menyimpan protoboard dan sensor infrared.
Lalu untuk roller, serta motor sendiri ditempatkan dibawah sebagai kaki dari si
robot.
4. Gambar
Rangkaian Arduino, Motor Driver, Sensor Infrared, Motor Dc, Protoboard Dan Battery.

5. Program Arduino Uno Ke Robot Line Follower
/*
Robot pengikut garis (line follower)
Pin 7 dan 8 adalah input sensor garis
Pin 2 dan 3 untuk drive motor kiri
Pin 4 dan 5 untuk drive motor kanan
dibuat oleh Semester 3 Teknik Elektro
*/
#define motorkif 2 //motor kiri maju
#define motorkib 3 //motor kiri mundur
#define motorkaf 4 //motor kanan maju
#define motorkab 5 //motor kanan mundur
void setup() {
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(7, INPUT);
pinMode(8, INPUT);
}
void loop() {
int sensorki = digitalRead(7); //baca sensor kiri
int sensorka = digitalRead(8); //baca sensor kanan
if ((sensorki == LOW) && (sensorka == LOW))
{
//kedua sensor tidak mengenai garis hitam
//gerak maju
digitalWrite(4, HIGH);
digitalWrite(5, LOW);
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
}
else if ((sensorki == HIGH) && (sensorka == LOW))
{
//sensor kiri mendeteksi garis hitam
//belok kiri
digitalWrite(4, HIGH);
digitalWrite(5, LOW);
digitalWrite(2, LOW);
digitalWrite(3, HIGH);
}
else if ((sensorki == LOW) && (sensorka == HIGH))
{
//sensor kanan mendeteksi garis hitam
//belok kanan
digitalWrite(4, LOW);
digitalWrite(5, HIGH);
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
}
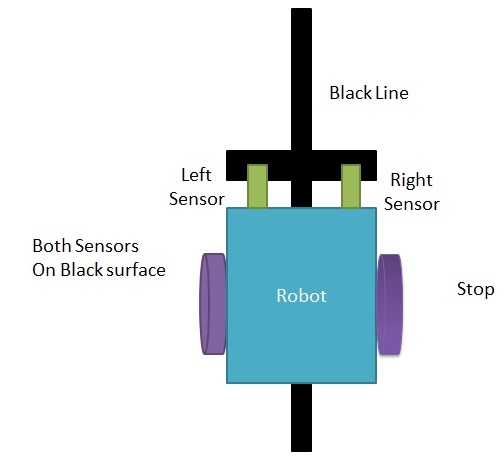
else
{
//kedua sensor mendeteksi garis
//stop
digitalWrite(5, LOW);
digitalWrite(4, LOW);
digitalWrite(2, LOW);
digitalWrite(3, LOW);
}
}
6. Block Diagram Robot Line Follower

7.
Skematik Kerja Line Follower



A.
A. Gambar Hasil Praktikum




PENUTUP
A.
kesimpulan
Pengembangan robot line follower tahap
ini, yaitu proses penambahan algoritma dan komponen yang digunakan untuk robot
berupa sensor photodiode. Sensor photodiode berfungsi untuk mengukur jarak
objek, agar jarak antara robot dengan objek di sekitarnya dapat diketahui,
sehingga tidak akan menyebabkan tabrakan antara robot dengan objek disekitarnya
(dinding) karena mengikuti garis.
Pembuatan robot masih bersifat sederhana.
Robot juga didukung oleh motor DC
sebagai pendorong putaran roda yang kecepatannya dikontrol oleh motor driver
& Arduino, sensor infrared sederhana sebagai pembaca garis yang di kontrol
oleh Arduino uno. Manfaat dari pengerjaan tugas ini, diharapkan dapat membantu
mahasiswa dalam memahami bagaimana cara membangun robot line follower dengan menggunakan
Arduino
uno, motor
driver, dan juga menggunakan sensor-sensor yang
diperlukan dalam bentuk komunikasi serial
analog dan/atau digital.
B.
Saran
Berikut
ini adalah beberapa tambahan yang diperlukan dalam meningkatkan kemampuan robot
pengikut garis:
·
Robot pengikut garis
yang kami buat tidak bisa berhenti secara otomatis untuk itu bisa dimodifikasi
dengan menuliskan program stop pada listing program.
·
Robot tidak mampu
mengikuti garis dengan tikungan yang tajam, dikarenakan dari bentuk mekanisme robot
yang kurang sempurna, juga karena kesensitifan sensor masih kurang, maka
sebaiknya dibuat mekanisme yang fleksibel terhadap tikungan yang tajam, juga
dengan menambahkan sensor sehingga akan lebih sensitif.
"SEMOGA BERHASIL & SUKSES" :)
HATUR NUHUN.....
BalasHapus